


Walker2D¶
此環境是 Mujoco 環境的一部分,其中包含關於環境的通用資訊。
動作空間 |
|
觀察空間 |
|
import |
|
描述¶
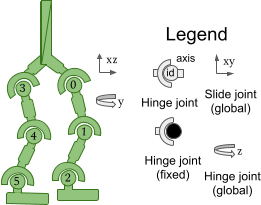
此環境建立在 hopper 環境的基礎上,增加了另一組腿,使機器人能夠向前行走而不是跳躍。 與其他 MuJoCo 環境一樣,此環境旨在增加相較於經典控制環境的獨立狀態和控制變數的數量。 Walker 是一個二維雙足機器人,由七個主要身體部位組成 - 頂部的一個軀幹(在軀幹後分成兩條腿)、軀幹下方中間的兩個大腿、大腿下方的兩條小腿,以及連接到腿部的兩個腳,整個身體都靠在腳上。 目標是通過對連接七個身體部位的六個鉸鏈施加扭矩,朝向前(右)方向行走。
動作空間¶
動作空間是一個 Box(-1, 1, (6,), float32)。 動作表示施加在鉸鏈關節上的扭矩。
編號 |
動作 |
控制最小值 |
控制最大值 |
名稱 (在相應的 XML 檔案中) |
關節 |
類型 (單位) |
|---|---|---|---|---|---|---|
0 |
施加在大腿轉子上的扭矩 |
-1 |
1 |
thigh_joint |
鉸鏈 |
扭矩 (N m) |
1 |
施加在小腿轉子上的扭矩 |
-1 |
1 |
leg_joint |
鉸鏈 |
扭矩 (N m) |
2 |
施加在腳轉子上的扭矩 |
-1 |
1 |
foot_joint |
鉸鏈 |
扭矩 (N m) |
3 |
施加在左大腿轉子上的扭矩 |
-1 |
1 |
thigh_left_joint |
鉸鏈 |
扭矩 (N m) |
4 |
施加在左小腿轉子上的扭矩 |
-1 |
1 |
leg_left_joint |
鉸鏈 |
扭矩 (N m) |
5 |
施加在左腳轉子上的扭矩 |
-1 |
1 |
foot_left_joint |
鉸鏈 |
扭矩 (N m) |
觀察空間¶
觀察空間由以下部分組成 (依序)
qpos (預設 8 個元素): 機器人身體部位的位置值。
qvel (9 個元素): 這些個別身體部位的速度 (它們的導數)。
預設情況下,觀察不包括機器人的 x 座標 (rootx)。 這可以通過在建構期間傳遞 exclude_current_positions_from_observation=False 來包含。 在這種情況下,觀察空間將是一個 Box(-Inf, Inf, (18,), float64),其中第一個觀察元素是機器人的 x 座標。 無論 exclude_current_positions_from_observation 設定為 True 還是 False,x 座標都會在 info 中返回,鍵分別為 "x_position" 和 "y_position"。
但是,預設情況下,觀察空間是一個 Box(-Inf, Inf, (17,), float64),其中的元素如下
編號 |
觀察 |
最小值 |
最大值 |
名稱 (在相應的 XML 檔案中) |
關節 |
類型 (單位) |
|---|---|---|---|---|---|---|
0 |
軀幹的 z 座標 (Walker2d 的高度) |
-Inf |
Inf |
rootz |
滑動 |
位置 (m) |
1 |
軀幹的角度 |
-Inf |
Inf |
rooty |
鉸鏈 |
角度 (rad) |
2 |
大腿關節的角度 |
-Inf |
Inf |
thigh_joint |
鉸鏈 |
角度 (rad) |
3 |
小腿關節的角度 |
-Inf |
Inf |
leg_joint |
鉸鏈 |
角度 (rad) |
4 |
腳關節的角度 |
-Inf |
Inf |
foot_joint |
鉸鏈 |
角度 (rad) |
5 |
左大腿關節的角度 |
-Inf |
Inf |
thigh_left_joint |
鉸鏈 |
角度 (rad) |
6 |
左小腿關節的角度 |
-Inf |
Inf |
leg_left_joint |
鉸鏈 |
角度 (rad) |
7 |
左腳關節的角度 |
-Inf |
Inf |
foot_left_joint |
鉸鏈 |
角度 (rad) |
8 |
軀幹 x 座標的速度 |
-Inf |
Inf |
rootx |
滑動 |
速度 (m/s) |
9 |
軀幹 z 座標 (高度) 的速度 |
-Inf |
Inf |
rootz |
滑動 |
速度 (m/s) |
10 |
軀幹角度的角速度 |
-Inf |
Inf |
rooty |
鉸鏈 |
角速度 (rad/s) |
11 |
大腿鉸鏈的角速度 |
-Inf |
Inf |
thigh_joint |
鉸鏈 |
角速度 (rad/s) |
12 |
小腿鉸鏈的角速度 |
-Inf |
Inf |
leg_joint |
鉸鏈 |
角速度 (rad/s) |
13 |
腳鉸鏈的角速度 |
-Inf |
Inf |
foot_joint |
鉸鏈 |
角速度 (rad/s) |
14 |
大腿鉸鏈的角速度 |
-Inf |
Inf |
thigh_left_joint |
鉸鏈 |
角速度 (rad/s) |
15 |
小腿鉸鏈的角速度 |
-Inf |
Inf |
leg_left_joint |
鉸鏈 |
角速度 (rad/s) |
16 |
腳鉸鏈的角速度 |
-Inf |
Inf |
foot_left_joint |
鉸鏈 |
角速度 (rad/s) |
排除 |
軀幹的 x 座標 |
-Inf |
Inf |
rootx |
滑動 |
位置 (m) |
獎勵¶
總獎勵為:reward = healthy_reward bonus + forward_reward - ctrl_cost。
healthy_reward: Walker2d 存活的每個時間步,它都會收到一個固定價值的獎勵
healthy_reward(預設為 \(1\)),forward_reward: 向前移動的獎勵,如果 Swimmer 向前移動 (在正 \(x\) 方向 / 向右方向),則此獎勵為正值。 \(w_{forward} \times \frac{dx}{dt}\),其中 \(dx\) 是 (前)「尖端」的位移 (\(x_{after-action} - x_{before-action}\)), \(dt\) 是動作之間的時間,這取決於
frame_skip參數 (預設為 \(4\)) 和frametime,即 \(0.002\) - 因此預設值為 \(dt = 4 \times 0.002 = 0.008\), \(w_{forward}\) 是forward_reward_weight(預設為 \(1\))。ctrl_cost: 對於採取過大動作的 Walker2d 的負獎勵。 \(w_{control} \times \|action\|_2^2\),其中 \(w_{control}\) 是
ctrl_cost_weight(預設為 \(10^{-3}\))。
info 包含個別獎勵條款。
起始狀態¶
初始位置狀態為 \([0, 1.25, 0, 0, 0, 0, 0, 0, 0] + \mathcal{U}_{[-reset\_noise\_scale \times I_{9}, reset\_noise\_scale \times I_{9}]}\)。 初始速度狀態為 \(\mathcal{U}_{[-reset\_noise\_scale \times I_{9}, reset\_noise\_scale \times I_{9}]}\)。
其中 \(\mathcal{U}\) 是多元均勻連續分佈。
請注意,z 座標是非零的,以便 Walker2d 可以立即站立。
回合結束¶
終止¶
如果 terminate_when_unhealthy is True (這是預設值),當 Walker2d 不健康時,環境會終止。 如果發生以下任何一種情況,Walker2d 就是不健康的
任何狀態空間值不再是有限的
軀幹的 z 座標 (高度) 不在 由
healthy_z_range參數給定的閉區間內 (預設為 \([0.8, 1.0]\))。角度的絕對值 (
observation[1]如果exclude_current_positions_from_observation=False,否則為observation[2]) 不在 由healthy_angle_range參數指定的閉區間內 (預設為 \([-1, 1]\))。
截斷¶
回合的預設持續時間為 1000 個時間步。
參數¶
Walker2d 提供一系列參數來修改觀察空間、獎勵函數、初始狀態和終止條件。 這些參數可以在 gymnasium.make 中以以下方式應用
import gymnasium as gym
env = gym.make('Walker2d-v5', ctrl_cost_weight=1e-3, ...)
參數 |
類型 |
預設值 |
描述 |
|---|---|---|---|
|
str |
|
MuJoCo 模型的路徑 |
|
float |
|
forward_reward 項的權重 (參見 |
|
float |
|
ctr_cost 項的權重 (參見 |
|
float |
|
healthy_reward 獎勵的權重 (參見 |
|
bool |
|
如果為 True,則在不健康時發出 |
|
tuple |
|
walker 的軀幹的 z 座標必須在此範圍內才被視為健康 (參見 |
|
tuple |
|
角度必須在此範圍內才被視為健康 (參見 |
|
float |
|
初始位置和速度的隨機擾動的比例 (參見 |
|
bool |
|
是否從觀察中省略 x 座標。 排除位置可以作為歸納偏見,以在策略中誘導與位置無關的行為 (參見 |
版本歷史¶
v5
最低
mujoco版本現在是 2.3.3。添加了對使用
xml_file參數的完全自訂/第三方mujoco模型 (以前只能對現有模型進行一些更改) 的支持。添加了
default_camera_config參數,一個用於設定mj_camera屬性的字典,主要用於自訂環境。添加了
env.observation_structure,一個用於指定觀察空間組成的字典 (例如qpos,qvel),對於為 MuJoCo 環境建構工具和包裝器很有用。返回一個非空的
info與reset(),以前返回一個空字典,新鍵與step()的狀態資訊相同。添加了
frame_skip參數,用於配置dt(step()的持續時間),預設值因環境而異,請查看環境文件頁面。在 v2、v3 和 v4 中,模型的兩個腳具有不同的摩擦值 (左腳摩擦 == 1.9,右腳摩擦 == 0.9)。
Walker-v5模型已更新為兩個腳具有相同的摩擦力 (設定為 1.9)。 這導致 Walker2d 的右腳在表面上滑動較少,因此需要更大的力才能移動 (相關的 GitHub issue)。修復錯誤:
healthy_reward在每個步驟都給出 (即使 Walker2D 不健康),現在僅在 Walker2d 健康時才給出。info“reward_survive” 已使用此更改更新 (相關的 GitHub issue)。恢復了
xml_file參數 (在v4中已移除)。在
info中添加了個別獎勵條款 (info["reward_forward"],info["reward_ctrl"],info["reward_survive"])。添加了
info["z_distance_from_origin"],它等於“軀幹”身體與其初始位置的垂直距離。
v4: 所有 MuJoCo 環境現在都使用 mujoco >= 2.1.3 中的 MuJoCo 綁定
v3: 支援
gymnasium.makekwargs,例如xml_file、ctrl_cost_weight、reset_noise_scale等。 rgb 渲染來自追蹤相機 (因此智能體不會從螢幕上跑掉)v2: 所有連續控制環境現在都使用 mujoco-py >= 1.50
v1: 基於機器人的任務的最大時間步數提高到 1000。 為環境添加了 reward_threshold。
v0: 初始版本發布