


Humanoid¶

此環境是 Mujoco 環境的一部分,其中包含有關環境的一般資訊。
Action Space |
|
Observation Space |
|
import |
|
Description¶
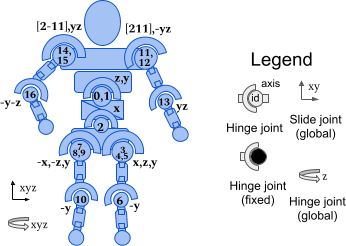
此環境基於 Tassa、Erez 和 Todorov 在「透過線上軌跡最佳化合成和穩定複雜行為」中介紹的環境。 3D 雙足機器人旨在模擬人類。它有一個軀幹(腹部),帶有一對腿和手臂,以及一對連接臀部和膝蓋的肌腱。腿部各由三個身體部位(大腿、小腿、腳)組成,手臂由兩個身體部位(上臂、前臂)組成。環境的目標是以盡可能快的速度向前行走而不會摔倒。
Action Space¶
動作空間為 Box(-0.4, 0.4, (17,), float32)。動作表示在鉸鏈關節處施加的扭矩。
Num |
Action |
Control Min |
Control Max |
Name (在相應的 XML 檔案中) |
Joint |
Type (Unit) |
|---|---|---|---|---|---|---|
0 |
在腹部的 y 坐標中,施加在鉸鏈上的扭矩 |
-0.4 |
0.4 |
abdomen_y |
hinge |
torque (N m) |
1 |
在腹部的 z 坐標中,施加在鉸鏈上的扭矩 |
-0.4 |
0.4 |
abdomen_z |
hinge |
torque (N m) |
2 |
在腹部的 x 坐標中,施加在鉸鏈上的扭矩 |
-0.4 |
0.4 |
abdomen_x |
hinge |
torque (N m) |
3 |
在軀幹/腹部和右髖部(x 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_hip_x (right_thigh) |
hinge |
torque (N m) |
4 |
在軀幹/腹部和右髖部(z 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_hip_z (right_thigh) |
hinge |
torque (N m) |
5 |
在軀幹/腹部和右髖部(y 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_hip_y (right_thigh) |
hinge |
torque (N m) |
6 |
在右髖部/大腿和右小腿之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_knee |
hinge |
torque (N m) |
7 |
在軀幹/腹部和左髖部(x 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_hip_x (left_thigh) |
hinge |
torque (N m) |
8 |
在軀幹/腹部和左髖部(z 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_hip_z (left_thigh) |
hinge |
torque (N m) |
9 |
在軀幹/腹部和左髖部(y 坐標)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_hip_y (left_thigh) |
hinge |
torque (N m) |
10 |
在左髖部/大腿和左小腿之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_knee |
hinge |
torque (N m) |
11 |
在軀幹和右上臂(坐標 -1)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_shoulder1 |
hinge |
torque (N m) |
12 |
在軀幹和右上臂(坐標 -2)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_shoulder2 |
hinge |
torque (N m) |
13 |
在右上臂和右下臂之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
right_elbow |
hinge |
torque (N m) |
14 |
在軀幹和左上臂(坐標 -1)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_shoulder1 |
hinge |
torque (N m) |
15 |
在軀幹和左上臂(坐標 -2)之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_shoulder2 |
hinge |
torque (N m) |
16 |
在左上臂和左下臂之間的轉子上施加的扭矩 |
-0.4 |
0.4 |
left_elbow |
hinge |
torque (N m) |
Observation Space¶
觀察空間由以下部分組成(依序)
qpos (預設為 22 個元素): 機器人身體部位的位置值。
qvel (23 個元素): 這些個別身體部位的速度(它們的導數)。
cinert (130 個元素): 剛性身體部位相對於質心的質量和慣性(這是過渡的中間結果)。它的形狀為 13*10 (nbody * 10)。 (cinert - 慣性矩陣和身體質量偏移量以及身體質量)
cvel (78 個元素): 基於質心的速度。它的形狀為 13 * 6 (nbody * 6)。 (com 速度 - 速度 x、y、z 和角速度 x、y、z)
qfrc_actuator (17 個元素): 在每個關節處作為致動器力產生的約束力。此形狀為
(17,)(nv * 1)。cfrc_ext (78 個元素): 這是基於質心的身體部位外部力。它的形狀為 13 * 6 (nbody * 6),因此為觀察空間增加了另外 78 個元素。 (外力 - 力 x、y、z 和扭矩 x、y、z)
其中 nbody 是機器人中的身體數量,而 nv 是自由度數量 (= dim(qvel))。
依預設,觀察不包括軀幹的 x 和 y 坐標。這些可以透過在建構期間傳遞 exclude_current_positions_from_observation=False 來包含在內。在這種情況下,觀察空間將是 Box(-Inf, Inf, (350,), float64),其中前兩個觀察是軀幹的 x 和 y 坐標。無論 exclude_current_positions_from_observation 設定為 True 還是 False,x 和 y 坐標都會在 info 中傳回,索引鍵分別為 "x_position" 和 "y_position"。
但是,依預設,觀察空間是 Box(-Inf, Inf, (348,), float64),其中位置和速度元素如下
Num |
Observation |
Min |
Max |
Name (在相應的 XML 檔案中) |
Joint |
Type (Unit) |
|---|---|---|---|---|---|---|
0 |
軀幹的 z 坐標(中心) |
-Inf |
Inf |
root |
free |
位置 (m) |
1 |
軀幹的 w 方向(中心) |
-Inf |
Inf |
root |
free |
角度 (rad) |
2 |
軀幹的 x 方向(中心) |
-Inf |
Inf |
root |
free |
角度 (rad) |
3 |
軀幹的 y 方向(中心) |
-Inf |
Inf |
root |
free |
角度 (rad) |
4 |
軀幹的 z 方向(中心) |
-Inf |
Inf |
root |
free |
角度 (rad) |
5 |
腹部的 z 角度(在 lower_waist 中) |
-Inf |
Inf |
abdomen_z |
hinge |
角度 (rad) |
6 |
腹部的 y 角度(在 lower_waist 中) |
-Inf |
Inf |
abdomen_y |
hinge |
角度 (rad) |
7 |
腹部的 x 角度(在 pelvis 中) |
-Inf |
Inf |
abdomen_x |
hinge |
角度 (rad) |
8 |
骨盆和右髖部之間角度的 x 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_x |
hinge |
角度 (rad) |
9 |
骨盆和右髖部之間角度的 z 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_z |
hinge |
角度 (rad) |
10 |
骨盆和右髖部之間角度的 y 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_y |
hinge |
角度 (rad) |
11 |
右髖部和右小腿之間的角度(在 right_knee 中) |
-Inf |
Inf |
right_knee |
hinge |
角度 (rad) |
12 |
骨盆和左髖部之間角度的 x 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_x |
hinge |
角度 (rad) |
13 |
骨盆和左髖部之間角度的 z 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_z |
hinge |
角度 (rad) |
14 |
骨盆和左髖部之間角度的 y 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_y |
hinge |
角度 (rad) |
15 |
左髖部和左小腿之間的角度(在 left_knee 中) |
-Inf |
Inf |
left_knee |
hinge |
角度 (rad) |
16 |
軀幹和右臂之間(在 right_upper_arm 中)的坐標 -1(多軸)角度 |
-Inf |
Inf |
right_shoulder1 |
hinge |
角度 (rad) |
17 |
軀幹和右臂之間(在 right_upper_arm 中)的坐標 -2(多軸)角度 |
-Inf |
Inf |
right_shoulder2 |
hinge |
角度 (rad) |
18 |
右上臂和右下臂之間的角度 |
-Inf |
Inf |
right_elbow |
hinge |
角度 (rad) |
19 |
軀幹和左臂之間(在 left_upper_arm 中)的坐標 -1(多軸)角度 |
-Inf |
Inf |
left_shoulder1 |
hinge |
角度 (rad) |
20 |
軀幹和左臂之間(在 left_upper_arm 中)的坐標 -2(多軸)角度 |
-Inf |
Inf |
left_shoulder2 |
hinge |
角度 (rad) |
21 |
左上臂和左下臂之間的角度 |
-Inf |
Inf |
left_elbow |
hinge |
角度 (rad) |
22 |
軀幹的 x 坐標速度(中心) |
-Inf |
Inf |
root |
free |
速度 (m/s) |
23 |
軀幹的 y 坐標速度(中心) |
-Inf |
Inf |
root |
free |
速度 (m/s) |
24 |
軀幹的 z 坐標速度(中心) |
-Inf |
Inf |
root |
free |
速度 (m/s) |
25 |
軀幹的 x 坐標角速度(中心) |
-Inf |
Inf |
root |
free |
角速度 (rad/s) |
26 |
軀幹的 y 坐標角速度(中心) |
-Inf |
Inf |
root |
free |
角速度 (rad/s) |
27 |
軀幹的 z 坐標角速度(中心) |
-Inf |
Inf |
root |
free |
角速度 (rad/s) |
28 |
腹部的 z 坐標角速度(在 lower_waist 中) |
-Inf |
Inf |
abdomen_z |
hinge |
角速度 (rad/s) |
29 |
腹部的 y 坐標角速度(在 lower_waist 中) |
-Inf |
Inf |
abdomen_y |
hinge |
角速度 (rad/s) |
30 |
腹部的 x 坐標角速度(在 pelvis 中) |
-Inf |
Inf |
abdomen_x |
hinge |
角速度 (rad/s) |
31 |
骨盆和右髖部之間角度的角速度的 x 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_x |
hinge |
角速度 (rad/s) |
32 |
骨盆和右髖部之間角度的角速度的 z 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_z |
hinge |
角速度 (rad/s) |
33 |
骨盆和右髖部之間角度的角速度的 y 坐標(在 right_thigh 中) |
-Inf |
Inf |
right_hip_y |
hinge |
角速度 (rad/s) |
34 |
右髖部和右小腿之間角度的角速度(在 right_knee 中) |
-Inf |
Inf |
right_knee |
hinge |
角速度 (rad/s) |
35 |
骨盆和左髖部之間角度的角速度的 x 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_x |
hinge |
角速度 (rad/s) |
36 |
骨盆和左髖部之間角度的角速度的 z 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_z |
hinge |
角速度 (rad/s) |
37 |
骨盆和左髖部之間角度的角速度的 y 坐標(在 left_thigh 中) |
-Inf |
Inf |
left_hip_y |
hinge |
角速度 (rad/s) |
38 |
左髖部和左小腿之間角度的角速度(在 left_knee 中) |
-Inf |
Inf |
left_knee |
hinge |
角速度 (rad/s) |
39 |
軀幹和右臂之間角度的角速度的坐標 -1(多軸)(在 right_upper_arm 中) |
-Inf |
Inf |
right_shoulder1 |
hinge |
角速度 (rad/s) |
40 |
軀幹和右臂之間角度的角速度的坐標 -2(多軸)(在 right_upper_arm 中) |
-Inf |
Inf |
right_shoulder2 |
hinge |
角速度 (rad/s) |
41 |
右上臂和右下臂之間角度的角速度 |
-Inf |
Inf |
right_elbow |
hinge |
角速度 (rad/s) |
42 |
軀幹和左臂之間角度的角速度的坐標 -1(多軸)(在 left_upper_arm 中) |
-Inf |
Inf |
left_shoulder1 |
hinge |
角速度 (rad/s) |
43 |
軀幹和左臂之間角度的角速度的坐標 -2(多軸)(在 left_upper_arm 中) |
-Inf |
Inf |
left_shoulder2 |
hinge |
角速度 (rad/s) |
44 |
左上臂和左下臂之間角度的角速度 |
-Inf |
Inf |
left_elbow |
hinge |
角速度 (rad/s) |
excluded |
軀幹的 x 坐標(中心) |
-Inf |
Inf |
root |
free |
位置 (m) |
excluded |
軀幹的 y 坐標(中心) |
-Inf |
Inf |
root |
free |
位置 (m) |
身體部位為
身體部位 |
id (適用於 |
id (適用於 |
|---|---|---|
worldbody (注意:所有值皆為常數 0) |
0 |
excluded |
torso |
1 |
0 |
lwaist |
2 |
1 |
pelvis |
3 |
2 |
right_thigh |
4 |
3 |
right_sin |
5 |
4 |
right_foot |
6 |
5 |
left_thigh |
7 |
6 |
left_sin |
8 |
7 |
left_foot |
9 |
8 |
right_upper_arm |
10 |
9 |
right_lower_arm |
11 |
10 |
left_upper_arm |
12 |
11 |
left_lower_arm |
13 |
12 |
關節為
joint |
id (適用於 |
id (適用於 |
|---|---|---|
root (注意:所有值皆為常數 0) |
0 |
excluded |
root (注意:所有值皆為常數 0) |
1 |
excluded |
root (注意:所有值皆為常數 0) |
2 |
excluded |
root (注意:所有值皆為常數 0) |
3 |
excluded |
root (注意:所有值皆為常數 0) |
4 |
excluded |
root (注意:所有值皆為常數 0) |
5 |
excluded |
abdomen_z |
6 |
0 |
abdomen_y |
7 |
1 |
abdomen_x |
8 |
2 |
right_hip_x |
9 |
3 |
right_hip_z |
10 |
4 |
right_hip_y |
11 |
5 |
right_knee |
12 |
6 |
left_hip_x |
13 |
7 |
left_hiz_z |
14 |
8 |
left_hip_y |
15 |
9 |
left_knee |
16 |
10 |
right_shoulder1 |
17 |
11 |
right_shoulder2 |
18 |
12 |
right_elbow |
19 |
13 |
left_shoulder1 |
20 |
14 |
left_shoulder2 |
21 |
15 |
left_elfbow |
22 |
16 |
(x,y,z) 坐標是平移自由度,而方向是表示為四元數的旋轉自由度。您可以在MuJoCo 文件中閱讀更多關於自由關節的資訊。
注意: 當使用 Humanoid-v3 或更早版本時,已報告當使用 mujoco-py 版本 > 2.0 時會發生問題,導致接觸力始終為 0。因此,建議使用 mujoco-py 版本 < 2.0,當您想要報告具有接觸力的結果時(如果在您的實驗中未使用接觸力,則可以使用版本 > 2.0)。
Rewards¶
總獎勵為:reward = healthy_reward + forward_reward - ctrl_cost - contact_cost。
healthy_reward:在 Humanoid 存活的每個時間步長(請參閱「Episode End」章節中的定義),它都會獲得固定值
healthy_reward的獎勵(預設為 \(5\))。forward_reward:向前移動的獎勵,如果 Humanoid 向前移動(在正 \(x\) 方向/向右方向),則此獎勵為正數。 \(w_{forward} \times \frac{dx}{dt}\),其中 \(dx\) 是質心的位移 (\(x_{after-action} - x_{before-action}\)),\(dt\) 是動作之間的時間,這取決於
frame_skip參數(預設為 \(5\)),以及frametime,即 \(0.001\) - 因此預設值為 \(dt = 5 \times 0.003 = 0.015\),\(w_{forward}\) 是forward_reward_weight(預設為 \(1.25\))。ctrl_cost:懲罰 Humanoid 採取過大動作的負獎勵。 \(w_{control} \times \|action\|_2^2\),其中 \(w_{control}\) 是
ctrl_cost_weight(預設為 \(0.1\))。contact_cost:如果外部接觸力過大,則懲罰 Humanoid 的負獎勵。 \(w_{contact} \times clamp(contact\_cost\_range, \|F_{contact}\|_2^2)\),其中 \(w_{contact}\) 是
contact_cost_weight(預設為 \(5\times10^{-7}\)),\(F_{contact}\) 是外部接觸力(請參閱觀察中的cfrc_ext章節)。
info 包含個別獎勵條款。
注意: Humanoid-v4 環境中存在一個錯誤,導致 contact_cost 始終為 0。
Starting State¶
初始位置狀態為 \([0.0, 0.0, 1.4, 1.0, 0.0, ... 0.0] + \mathcal{U}_{[-reset\_noise\_scale \times I_{24}, reset\_noise\_scale \times I_{24}]}\)。初始速度狀態為 \(\mathcal{U}_{[-reset\_noise\_scale \times I_{23}, reset\_noise\_scale \times I_{23}]}\)。
其中 \(\mathcal{U}\) 是多元均勻連續分佈。
請注意,z 和 x 坐標是非零的,因此 humanoid 可以立即站起來並面向前方(x 軸)。
Episode End¶
Termination¶
如果 terminate_when_unhealthy is True(預設值),則當 Humanoid 不健康時,環境會終止。如果發生以下任何一種情況,則稱 Humanoid 為不健康
軀幹的 z 坐標(高度)不在
healthy_z_range參數給定的閉區間內(預設值為 \([1.0, 2.0]\))。
Truncation¶
劇集的預設持續時間為 1000 個時間步長。
Arguments¶
Humanoid 提供一系列參數來修改觀察空間、獎勵函數、初始狀態和終止條件。這些參數可以在 gymnasium.make 中以以下方式應用
import gymnasium as gym
env = gym.make('Humanoid-v5', ctrl_cost_weight=0.1, ....)
Parameter |
Type |
Default |
Description |
|---|---|---|---|
|
str |
|
MuJoCo 模型的路徑 |
|
float |
|
forward_reward 項的權重(請參閱 |
|
float |
|
ctrl_cost 項的權重(請參閱 |
|
float |
|
contact_cost 項的權重(請參閱 |
|
float |
|
Clamp contact_cost 項(請參閱 |
|
float |
|
healthy_reward 項的權重(請參閱 |
|
bool |
|
如果 |
|
tuple |
|
如果軀幹的 z 坐標在此範圍內,則 humanoid 被視為健康(請參閱 |
|
float |
|
初始位置和速度的隨機擾動比例(請參閱 |
|
bool |
|
是否從觀察中省略 x 和 y 坐標。排除位置可以作為歸納偏差,以在策略中誘導位置不可知的行為(請參閱 |
|
bool |
|
是否在觀察中包含 cinert 元素(請參閱 |
|
bool |
|
是否在觀察中包含 cvel 元素(請參閱 |
|
bool |
|
是否在觀察中包含 qfrc_actuator 元素(請參閱 |
|
bool |
|
是否在觀察中包含 cfrc_ext 元素(請參閱 |
Version History¶
v5
最低
mujoco版本現在為 2.3.3。新增支援使用
xml_file參數完全自訂/第三方mujoco模型(先前只能對現有模型進行少量變更)。新增
default_camera_config參數,這是一個用於設定mj_camera屬性的字典,主要用於自訂環境。新增
env.observation_structure,這是一個用於指定觀察空間組成的字典(例如qpos、qvel),適用於為 MuJoCo 環境建構工具和 wrappers。傳回非空的
info和reset(),先前傳回的是空字典,新索引鍵與step()的狀態資訊相同。新增
frame_skip參數,用於設定dt(step()的持續時間),預設值因環境而異,請查看環境文件頁面。修正錯誤:
healthy_reward在每個步驟都會給予(即使 Humanoid 不健康),現在僅在 Humanoid 健康時給予。info["reward_survive"]會隨著此變更而更新(相關的 GitHub issue)。恢復
contact_cost以及相應的contact_cost_weight和contact_cost_range參數,其預設值與Humanoid-v3中的相同(在v4中已移除)(相關的 GitHub issue)。從觀察空間中排除
worldbody和root/freejointqfrc_actuator的cinert&cvel&cfrc_ext,因為它始終為 0,因此沒有為智能體提供有用的資訊,從而稍微加快了訓練速度(相關的 GitHub issue)。恢復
xml_file參數(在v4中已移除)。新增
include_cinert_in_observation、include_cvel_in_observation、include_qfrc_actuator_in_observation、include_cfrc_ext_in_observation參數,以允許從觀察空間中排除觀察元素。修正
info["x_position"]&info["y_position"]&info["distance_from_origin"]傳回xpos而不是基於qpos的觀察(xpos觀察比mj_step()落後 1 個 here)(相關的 GitHub issue #1 & GitHub issue #2)。新增
info["tendon_length"]和info["tendon_velocity"],其中包含 Humanoid 的 2 條肌腱(連接臀部和膝蓋)的觀察。將
info["reward_alive"]重新命名為info["reward_survive"],以與其他環境保持一致。將
info["reward_linvel"]重新命名為info["reward_forward"],以與其他環境保持一致。將
info["reward_quadctrl"]重新命名為info["reward_ctrl"],以與其他環境保持一致。移除
info["forward_reward"],因為它等同於info["reward_forward"]。
v4:所有 MuJoCo 環境現在都使用 mujoco >= 2.1.3 中的 MuJoCo 綁定
v3:支援
gymnasium.makekwargs,例如xml_file、ctrl_cost_weight、reset_noise_scale等。 rgb 渲染來自追蹤相機(因此智能體不會從螢幕上跑掉)注意:環境機器人模型在
gym==0.21.0時略有變更,並且訓練結果與gym<0.21和gym>=0.21不具可比性(相關的 GitHub PR)
v2:所有連續控制環境現在都使用 mujoco-py >= 1.50
注意:環境機器人模型在
gym==0.21.0時略有變更,並且訓練結果與gym<0.21和gym>=0.21不具可比性(相關的 GitHub PR)
v1:機器人基礎任務的最大時間步長增加到 1000。為環境新增了 reward_threshold。
v0:初始版本發佈